D3P-1600-P3 Delta roboty
Önümiň häsiýetnamasy
Aýratynlyk
1 Cycle Iň ýokary tizlik we ykdysady gözlegiňize laýyk gelýän adaty sikl wagty 0,4-den az.
2 Ho Aýlanma okundaky Hooke bogunynyň ösen dizaýny, robotyň ýokary dykyzlykly gaýtalanma işine aňsatlyk bilen çemeleşmäge mümkinçilik berýär.
3 robot Robot azyk we lukmançylyk pudagynda ýokary tizlikli önümçilik üçin amatlydyr.Spaceer beýikligi çäkli ýagdaýlarda ownuk materiallary ýygnamakda, işlemekde we saýlamakda giňden ulanylýar.
Önümiň parametrleri
| Görnüşi | D3P-1600-P3 | |
| Baltalar | 3 + 1 | |
| Loadük | 3kg | |
| Manipulýator | Agram | 96,8 kg |
| Diametri | 1600mm | |
| Gaýtalama | Positionerleşişi | 0.05mm |
| Aýlanma | 0,1 ° | |
| Iň ýokary tizlik | 500pp / min | |
| Aýlanma aralygy | ± 360 | |
| Inersiýanyň iň ýokary pursaty | 31 × 10-4kg .m2 | |
| Aktiw goluň burç aralygy | Upokarda | 28º |
| Aşakda | 73º | |
| Elektrik üpjünçiligi | Üç fazaly 380VAC -10% ~ + 10%, 49 ~ 61HZ | |
| Kuwwat kuwwaty | 10KVA | |
| Bahalandyrylan güýç | 6.1kw | |
| Saklaýyş temperaturasy | -10 ℃ ~ 70 ℃ | |
| Iş gurşawy | -10 ℃ ~ 50 ℃ , RH≤80% | |
| Gorag | IP55 | |
Haryt çyzgysy
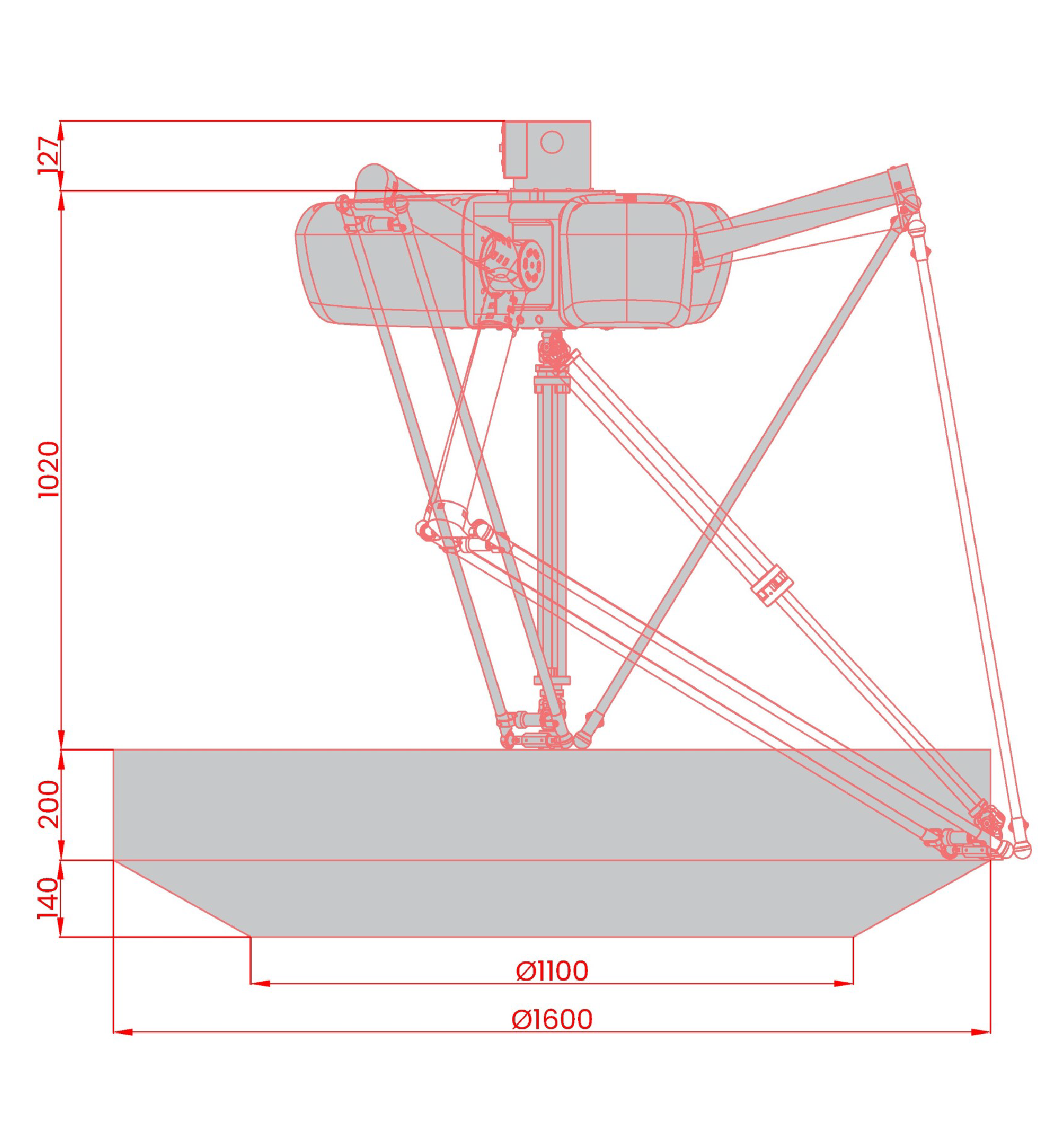
01. Ölçegler we iş aralygy (mm)
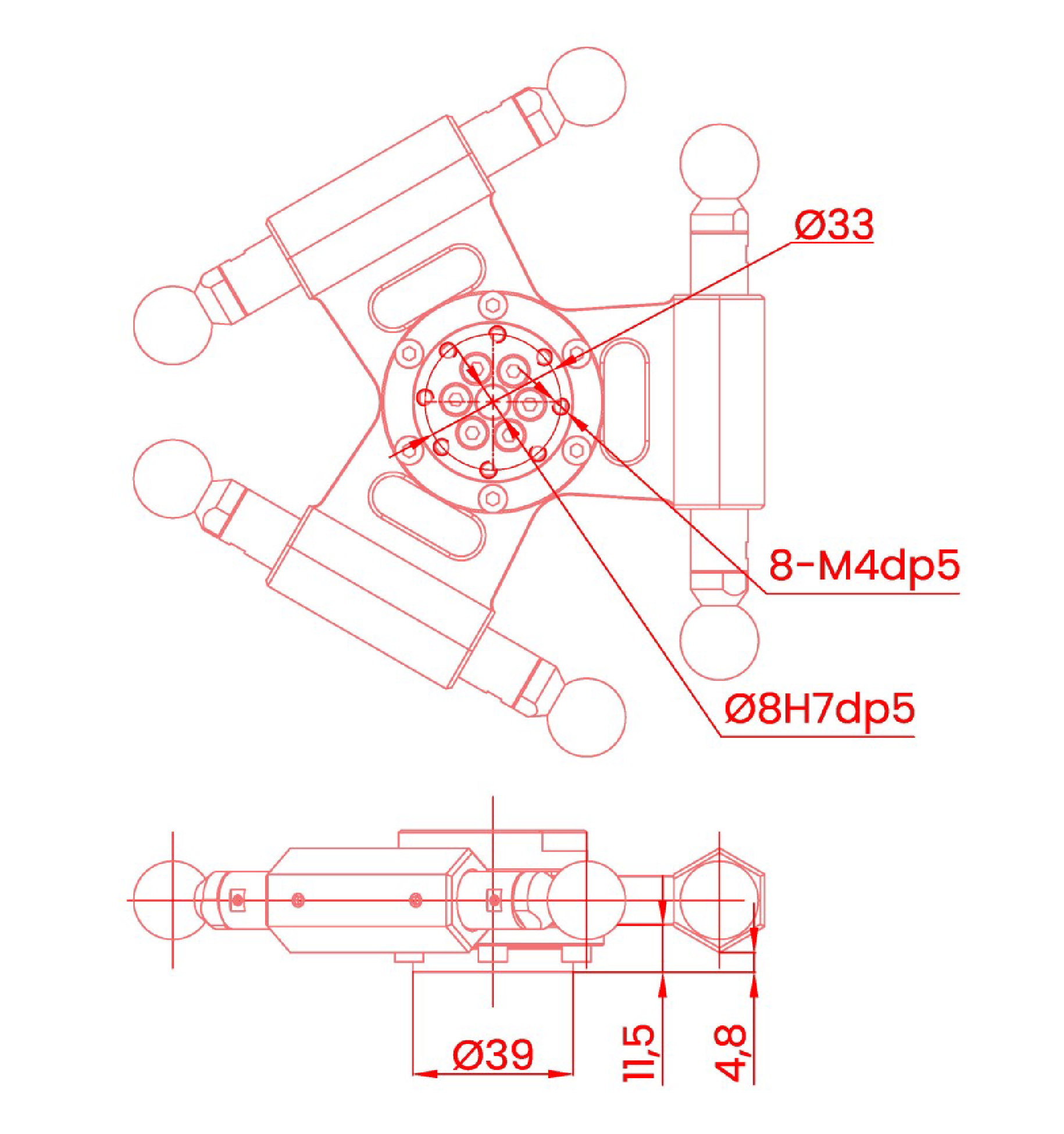
02. Flanes (mm)
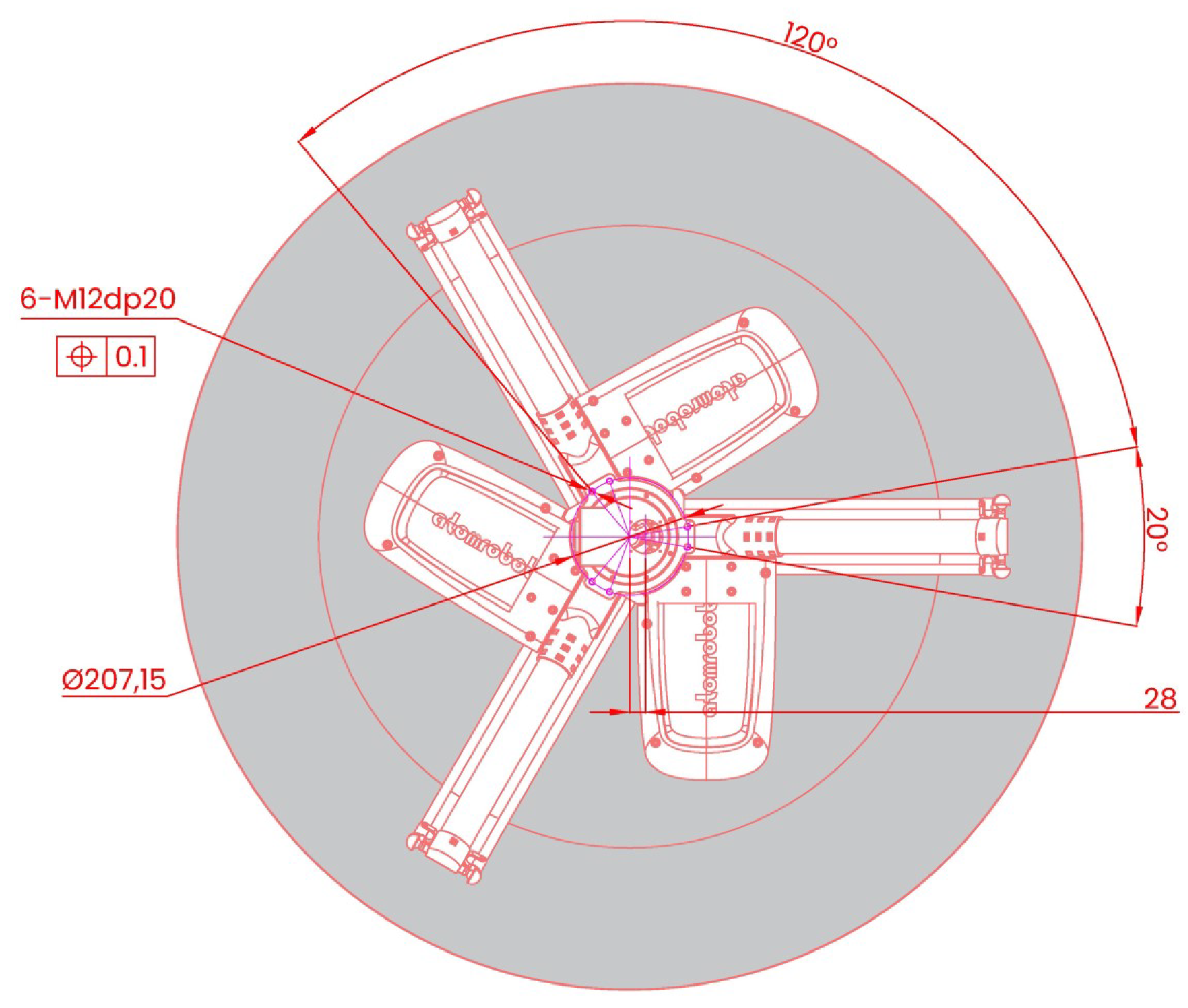
03. Esasy gurnama (mm)
Habaryňyzy şu ýere ýazyň we bize iberiň